
馬達與電力電子
馬達控制入門系列
馬達控制Part 1:無刷直流馬達介紹
透過影片了解無刷DC馬達(BLDC馬達)基礎。BLDC馬達比起有刷馬達提供了許多優點。它們具備高效率,不需要太多維護,並且常見於居家應用、機器人、汽車等產業。

馬達控制Part 2:無刷直流馬達控制
藉由這段影片,你可以學習如何設計一個馬達控制演算法來控制BLDC馬達的速度。影片將介紹系統內不同的元件是如何運作,像是整流邏輯和三相逆變器。

馬達控制Part 3:利用PWM進行BLDC速度控制
本段影片討論到脈波寬度調變(pulse-width modulation,PWM)以及兩種實現用來控制BLDC馬達速度的PWM控制器的不同架構。
馬達控制

馬達控制演算法設計與快速原型化
本段影片將展示參與馬達開發各項流程的研發團隊可以如何透過MathWorks提供的研發工具的協助來協同合作、增進研發效率。
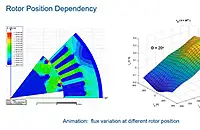
永磁同步馬達模型種類介紹與模擬實現
本段演講介紹3種不同類型的永磁同步馬達(Permanent Magnet Synchronous Motor,PMSM)模型—集總參數(lumped parameter)模型、以磁通量為基礎的飽和(flux-based saturation)模型、飽和+空間諧波(saturation + spatial harmonics)模型。

馬達設計與實現工具- Motor Control Blockset
MathWorks®的Motor Control Blockset提供了函式庫以及一系列已經可以部署的參考範例,讓使用者能夠快速模擬馬達控制演算法及產生程式碼。
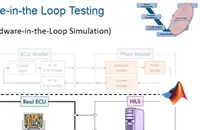
使用Simulink Real-Time與Speedgoat模擬器進行馬達驅控器的HIL測試
本段演講介紹如何利用HDL Coder搭配Simulink Real-Time與Speedgoat即時目標電腦,部署一個馬達及逆變器的系統層級模型,並執行在FPGA上來執行硬體迴圈(HIL)測試。
控制演算法實現
馬達控制演算法之建模與快速原型化
許多設計師採用SoC FPGA裝置來將處理器與FPGA功能整合進一個單一的裝置,以降低系統電力成本及縮小板子尺寸。在SoCs上實現演算法的複雜性卻帶給演算法開發人員、軟體開發人員與硬體設計師不同的挑戰。本段影片將展示如何透過馬達控制系統的建模與模擬,在於硬體上進行測試之前先對控制器的設計做評估。