MATLAB® & Simulink®與自動駕駛應用
汽車工程師使用MATLAB和Simulink來設計自動駕駛系統功能,包括感測、路徑規劃、感測器融合與控制。藉由MATLAB和Simulink的協助,你可以:
- 利用針對電腦視覺、光學雷達(lidar)和雷達處理、以及感測器融合的預建演算法、感測器模型、和app來開發感知系統。
- 使用組裝完備的參考應用,在3D環境中設計控制系統,以及建立車輛動態模型。
- 使用合成感測器模型建立駕駛場景來進行測試和系統驗證。
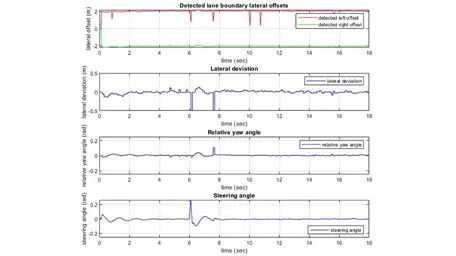
- 使用自動駕駛設計專門的視覺化。
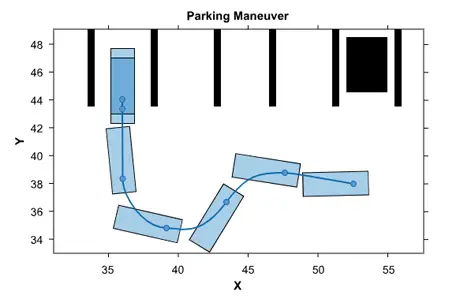
- 透過設計和使用車輛代價地圖(costmap)和運動規劃演算法來規劃駕駛路徑。
- 減少為了符合 ISO 26262規範所需的工程投入。
- 透過程式碼生成工具自動產生C程式碼來進行快速原型化和HIL測試。