MATLAB® & Simulink® 於無人機的應用發展
從建模、設計到實現,MATLAB & Simulink 完整支援無人機 (UAV) 開發全流程:
- 無人機系統架構的建模與分析
- 同步考慮環境變因狀況下,設計飛行控制演算法並搭配無人機動態模型進行模擬。
- 使用預建演算法、感測器模型以及用於電腦視覺、光達和雷達處理以及感測器融合的應用程式(App),開發用於自主飛行的感知和運動規劃系統
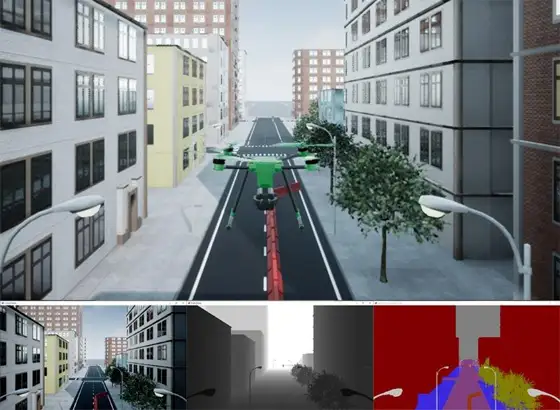
- 在閉環 3D 模擬環境中評估無人機性能
- 自動生成程式碼以部署到飛行控制器和機載運算板
- 透過 MATLAB & Simulink 連接並控制無人機
- 分析無人機飛行遙測和酬載數據

 2:14
2:14