
![���F�t��k���]�p�P����](../../../images/svg/1698066744023.svg)


�������F����t��k
�ϥ�MATLAB�PSimulink�q���F�B�f�ܾ��B�ӷ��P�t���禡�w�إ߰��F�ҫ��C�b���F�M�f�ܾ��ؼҮɨ̾ڻݨD��ܹG�u�{���šA�åB�������F����t��k�C
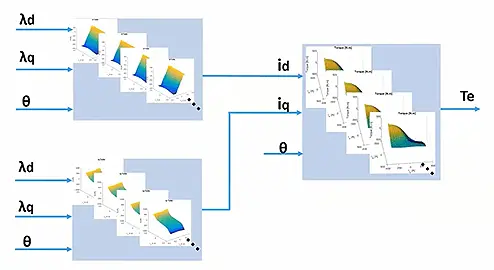
- ��{�u�ʶ����Ѽ�(lumped-parameter)���F�ҫ��A�H�γz�LMotor Control Blockset�ϥΥ����Ȱf�ܾ��Ӷi��ֳt����
- �ϥ�Power Systems Simulation Oramp�F�ѫD�u�ʰ��F�ʺA�ؼһP�����A�H�ΰf�ܾ����z�Q�βӸ`�����v�Ť���
- �z�L�������աA�Ϊ̱q��ƩΦ����������R�פJ�ѼƨӶi�氨�F�ҫ��Ѽ� �ơA�Ǧ��������F�ʺA
- ����ʳ��j������èϥκϳ��ɦV����(Field Oriented Control�AFOC) Autotuner�Ӧ۰ʽո`����t��k�H�F��t�שM�O�x�T���n�D
- �]�p�G�ٰ����M�O�@��H�T�O�w�����B�@
�Y�ɼ���
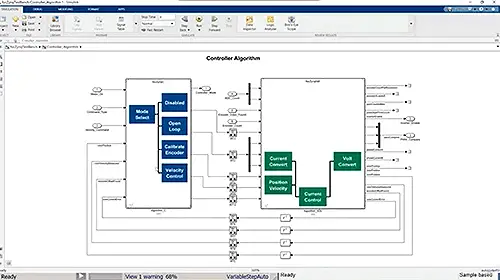
�ϥ�Simulink���͵{���X�Ӱ���Y�ɼ����P���աC
- �q���F����t��k����C�BC++��HDL�{���X�A�ϥΧY�ɥؼеw�����ֳt����쫬��
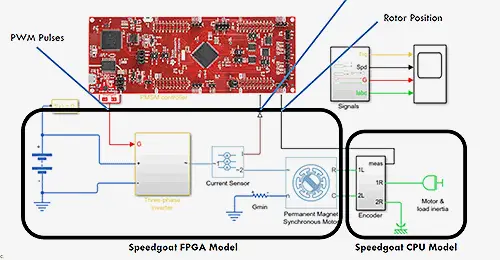
- �H���F1 MHz�������W�v����w��j��(hardware-in-the-loop�AHIL)���������簨�F���
- ��Speedgoat���Y�ɼ����䴩
���~�Ƶ{���X���ͦ��P���p
�qSimulink�����F����t��k���ͥi���~�ƪ�C�MHDL�{���X�A�������p�ܴO�J���L����BFPGAs�B�MSoCs���ؼеw��C
- ����n��j��(software-in-the-loop�ASIL)�P�B�z���j��(processor-in-the-loop�APIL)���������Ҳ��ͪ��{���X
- �z�LFixed-Point Designer���R�B�u�ƨù�{�w�I�P�B�I�t��k
- �ϥ�Embedded Coder�M�w��䴩�M��A�۰ʾ�X�B��������Ұ����ARM® Cortex®-A/M/R�BC2000�BSTM32�BInfineon® AURIX™�BXilinx® Zynq®�MIntel® SOC���B�z�����{���X
- �ϥ�HDL Coder�M�w��䴩�M�͵{���X�A�åB���p�bIntel�BXilinx�MMicrochip�˸m
- �T�O�ŦX���~�зǡA�pMISRA-C™�PISO 26262
�i�@�B����
Onramp���ʦ��u�W�ҵ{
- Simulink�J��
- Simscape�J��
- �q������
- �q�O�q�l����
- �q�O�t���