MATLAB® & Simulink® 在越野載具的應用發展 學習如何建立用來開發與驗證重型機械的控制與自主性的虛擬測試平台。
在建築、礦業、農業以及林業等產業中,負責開發重型機具先進控制、自動化以及自主功能的工程師,可以透過以下教學以及範例建立越野載具的虛擬測試平台。
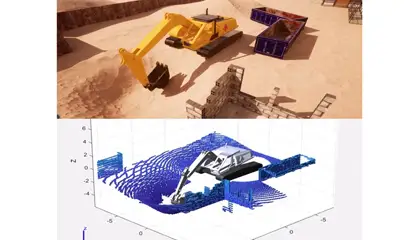
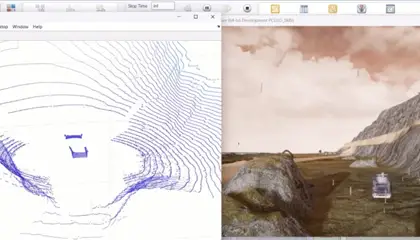
透過虛擬測試平台可以結合高保真度的物理建模、運動學設計以及寫實虛擬模擬,改良及驗證越野載具的進階控制、自動化以及自主演算法,確保這些功能在實際部署前具備可靠的效能。

在建築、礦業、農業以及林業等產業中,負責開發重型機具先進控制、自動化以及自主功能的工程師,可以透過以下教學以及範例建立越野載具的虛擬測試平台。
透過虛擬測試平台可以結合高保真度的物理建模、運動學設計以及寫實虛擬模擬,改良及驗證越野載具的進階控制、自動化以及自主演算法,確保這些功能在實際部署前具備可靠的效能。