MATLAB® & Simulink® 在自主無人水下載具的應用發展
跨領域團隊可以將 MATLAB 和 Simulink 作為貫穿整個自主無人水下載具工作流程中的共同整合環境。從系統工程到平台建模、環境模擬以及自主演算法設計,以模型為基礎的設計可以幫助你在海試前,降低危險性以及提升對系統效能的信心。
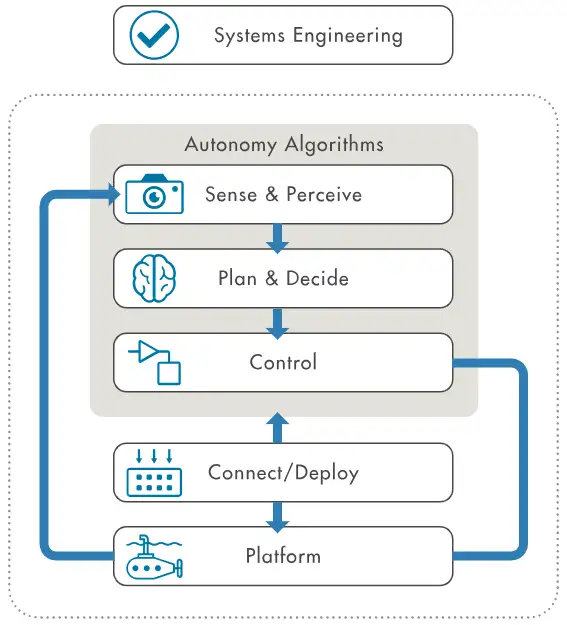

跨領域團隊可以將 MATLAB 和 Simulink 作為貫穿整個自主無人水下載具工作流程中的共同整合環境。從系統工程到平台建模、環境模擬以及自主演算法設計,以模型為基礎的設計可以幫助你在海試前,降低危險性以及提升對系統效能的信心。
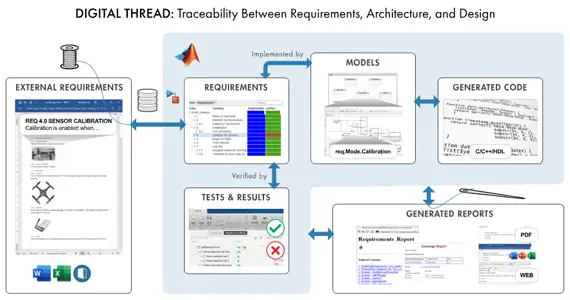
您可以使用MATLAB和Simulink去創造一個真實的數位線程(digital thread),讓需求能追蹤到系統架構,並延伸到實作以及程式碼生成。您能夠使用動態模型(例如機電系統與螺旋槳)執行方案評估,以及評估任務規劃所需的高階通訊系統建模,並透過電力系統的建模,在考慮電池容量或峰值負載等電力限制條件下評估整體系統效能。隨著設計逐漸成熟,藉由 DDS 和 ROS中介軟體,各元件與應用程式可以共享資訊並協同運作。
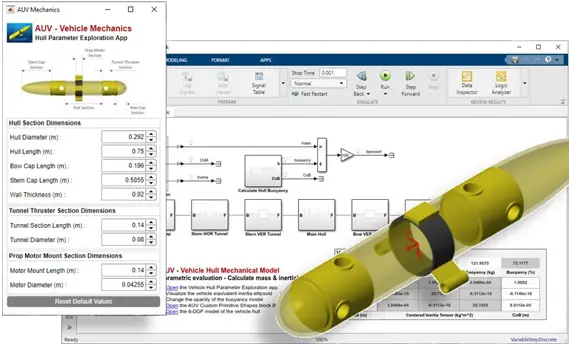
您可以使用MATLAB和Simulink為水下載具建立高效且強韌的多領域模型。使用 Simscape 和 Simscape Multibody 進行物理建模,可將流體力學、流體效應、動態行為,以及從 CAD 模型導入的慣性效應整合在一起。Simscape Electrical 可讓您建構包含電池與推進器等電子與機電元件的電力系統模型。透過逼真的機電物理模型,您可以模擬元件故障並評估系統層級性能。您可以透過 Simulink,將物理模型連結至低解析度的立方體環境或 Unreal Engine的寫實世界,建立閉迴路,以進行感測器行為模擬、感知演算法的驗證,並展示您的模擬結果。
MATLAB 和 Simulink 提供工具,協助您開發演算法並最佳化系統效能。您可以使用感測器模型(如聲納、相位陣列與慣性測量單元 IMU)來建立系統感知環境的原型,用於感測器融合、定位、製圖與追蹤。MATLAB 和 Simulink 利用機器學習以及深度學習進一步提升載具的自主性。此外,通訊工具箱和相位陣列系統工具箱可協助分析訊號傳播與路徑損失模型,用於任務規劃或通訊效能評估。
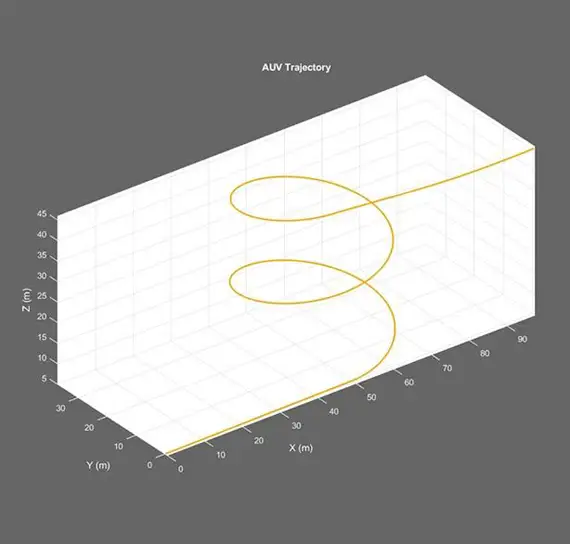
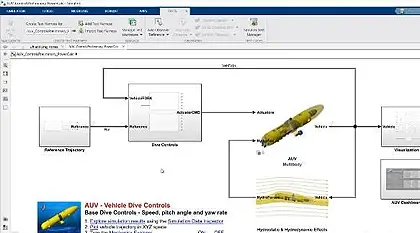
您可以利用 MATLAB 和 Simulink 針對海洋載具的運動規劃與路徑追蹤控制器進行設計、迭代及最佳化,並在 2D 和 3D場景中模擬載具的運動。在 3D 模擬,您可以建模並觀察海洋載具在不同軸向之間的運動耦合效應;同時監測能耗、轉彎半徑等參數,並依特定指標最佳化運動規劃器透過 MATLAB 和 Simulink 設計的運動控制器,還可以直接部署到微控制器 (MCU)、現場可程式化邏輯閘陣列 (FPGA) 等嵌入式硬體上。


您可以使用MATLAB 和 Simulink建立系統邏輯模型,並評估運動規劃器與相關演算法。其中,運動規劃、定位和製圖的相關範例可協助您建立自訂化解決方案,並提供您測試的基準。您可以在不同的感測器調整參數選項,像是量測範圍、解析度、雜訊與功率...等探索設計的折衷方案。
此外,您也可以將高保真度或是系統層級的載具動態行為(像是滾轉角以及最小轉彎半徑)納入路徑規劃的設計考量。而Stateflow 可協助您設計與開發監督控制、任務排程與故障管理系統。
 47:22
47:22