MATLAB® & Simulink® 在機械手臂的應用發展
MATLAB & Simulink為機械手臂的開發提供了專門的演算法、模擬工具、ROS和硬體連接支援。
- 整合CAD的機構設計與電氣系統模型
- 分析功耗以選擇最有效的設計和軌跡
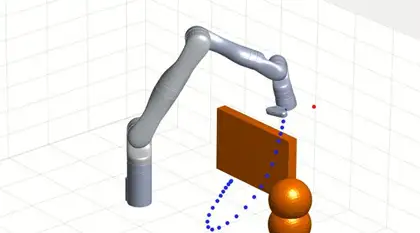
- 使用內建演算法和感測器模型發展感知和運動規劃的機械手臂應用
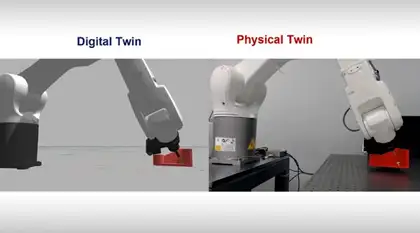
- 在3D模擬環境,結合機器人模型進行控制演算法的設計與模擬
- 透過連接外部模擬器或真實機器人來評估機器人的操作演算法
- 使用MATLAB & Simulink連接並控制機器人,例如UR Cobots
- 自動產生生產等級程式碼,可部署至機器人控制器與板載運算板
- 使用參考應用範例推進機器人專案,涵蓋自主機器人應用的整合開發工作流程