H 產品應用 機器人/自主系統 教學與範例 機器人/自主系統系統資源更多MATLAB®/Simulink®開發機器人入門相關資源 簡介 無人機 自主移動機器人 機械手臂 自主水下無人載具 越野載具 教學與範例 >
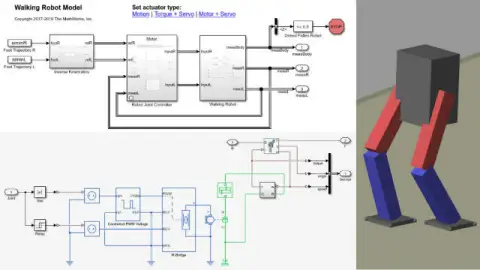
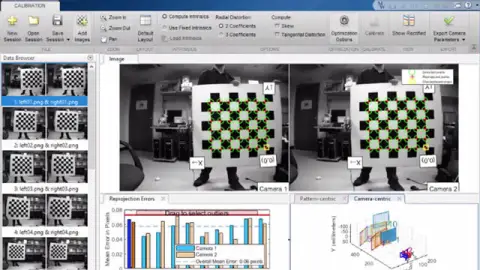
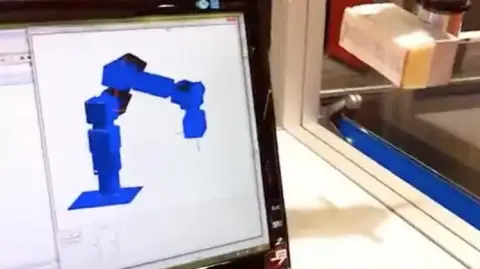
平台設計 自走機器人的建模與模擬 在多重運動學約束下的及物軌跡規劃 以模擬測試機器人的自主性 感測 利用MATLAB進行攝影機校正 在MATLAB中使用基礎的ROS Messages開始使用ROS ROS入門教學 從Simulink產生獨立的ROS節點 將ROS節點部署到Raspberry Pi 感知 駕駛輔助系統的交通號誌辨識 MATLAB於深度學習:以11行MATLAB程式碼完成深度學習 MATLAB於深度學習:以10行MATLAB程式碼實現遷移式學習 物件追蹤與跟隨範例 從感知到動作:工業機器人設計應用 智慧工廠:透過感知到動作創造先進的自主性工業機器人 路徑規劃與決策 利用MATLAB & Simulink設計取放型機器人應用 自主導航 不同複雜度環境下的路徑規劃 自主性機器人的路徑規劃及導航 使用 MATLAB 實現同步定位與地圖構建(SLAM)演算法 工業型機器人:從感知到動作 控制系統 利用MATLAB & Simulink進行工業型機器人程式設計 使用逆向動力學計算致動器力矩 在Simulink設計PID控制器 使用 Simulink 實現機械手臂的安全控制與軌跡追蹤 通訊 Simulink與ROS入門 從Simulink連結至支援 ROS的機器人 CAN 訊息的傳送和接收 安裝適用於Arduino的MATLAB & Simulink 支援套件 Simulink 硬體支援套件簡介:PARROT 迷你無人機 利用MATLAB和ROS驗證工業機器人的抓取系統(安川電機,Yaskawa Electric Corporation)